6.270 – MIT’s Autonomous Robot Design Competition is a hands-on, learn-by-doing class open only to MIT students, in which participants design and build a robot that will play in a competition at the end of January. The goal for the students is to design a machine that will be able to navigate its way around the playing surface, recognize other opponents, and manipulate game objects. 6.270 robots are totally autonomous, so once a round begins, there is no human intervention.
The students work in teams of two or three. Each team is given the same kit containing various sensors, electronic components, batteries, motors, and LEGO. The kits are handed out in the beginning of January and they have three weeks in which to transform the parts into a working robot.
We were the Keepers of the Purple Dragon (and our robot’s name is the Purple Dragon.

Our wonderful poster that we held up during our rounds. Drawn and colored by Julie.
6.270 was a tumultuous journey, but the Purple Dragon turned out okay. We remade the Purple Dragon 3-4 times, had lots of geartrain issues, and bracing problems. When we were seeding, we realized a lot of this competition has to do with luck (and a bit of skill). So we solidified our strategy, made our robot super reliable, and ended up winning the competition (even after losing to a placebo bot – the Ferris Wheel – once).
However, we did not end up pulling any all-nighters, but we did spend about 5 hours everyday working on the Purple Dragon. But most of all, we had a lot of fun. Also, you don’t need to know anything about coding or building with Legos for this competition (Julie’s Course 10B and has never played with Legos before 6.270).
Construction Habits
So how is the Purple Dragon built? We built a rectangular base and then built the rest of the robot around the base. The gear trains are pretty close to each other (we used a 75:1 gear ratio). For our ball catching mechanism, we used a two-way ball gate but we realized later that we didn’t really need the gate, so we took it out (the balls kept staying with our robot when we didn’t want them too). After heavily bracing this frame, we mounted our happy board and batteries.
A major problem was this mounting of the happy board and batteries. We couldn’t find a way to keep this part of the robot attached correctly and braced well to the rest of the robot, and so later on, it kept falling off (which is why we lost to the placebo). So in between each round, we just pushed this unit back onto the base of the Purple Dragon.
What sensors did we use in the Purple Dragon? We used 3 phototransistor/LED pairs to recognize what side of the board we were on and what color balls were ours. We also used 2 bump sensors in the front of the Purple Dragon so that he would know when he bumped into a wall. We used solely the gryo to go straight and make turns (which we were told was not a good idea since the gyro loses accuracy as the game goes on). We also used a servo to make our two-way ball gate (which we didn’t need anyway). And I think that was it. (I guess we didn’t use too many sensors…)
Robot Versions

Version 1 of Purple Dragon (which was not very good)

Version 2 (which was somewhat better)
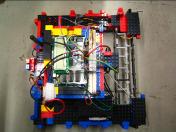
Final version
Strategy
Our strategy was pretty simple. During the seeding rounds, we figured out that most teams would first retrieve their four balls, so we decided we would retrieve our two balls first. The two balls were on the shorter side of the board, so we knew that our robot was most likely going to make it to the territory first.
For example, if we started in the B position, we would first head to the X territory. Since this side of the board was shorter, we’d hopefully get to the territory first, and thus block our opponent from scoring their four balls.
Initial move was to move along shortest side
We’d wait the in the X territory for about 5-8 seconds, then back up all the way to our starting position, turn 90 degrees, go and collect our four balls, and stay in the Z territory for the rest of the game (so that we could block our opponents balls from that territory and protect our balls).
The second step was to return to the longest side
One important thing to note is that driving straight and turning is very important (and often looked past). To line up with the side of the board, we had the Purple Dragon back up and smack itself against the wall. This also corrected for any ill-turning of the Purple Dragon. Our robot, since we had perfected our geartrain to be super- smooth, would drive straight as long as the motors were set as the same speed. (Thus, it is very important to have a very good geartrain.)